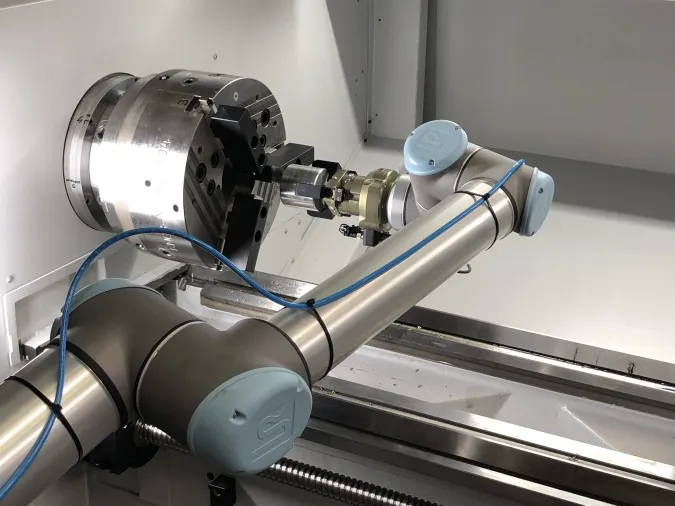
Se desarrolló una célula automatizada con un robot colaborativo UR10 para asistir un torno CNC en tareas de alimentación de materia prima y extracción de piezas mecanizadas, con interacción segura y sin necesidad de resguardos físicos, gracias a su diseño colaborativo.
Características Técnicas del Sistema:
|
Componente
|
Especificación
|
|---|---|
|
Robot UR10 |
Alcance: 1300 mm · Carga útil: 12,5 kg · Repetibilidad: ±0.05 mm |
|
Gripper |
Pinza neumática de doble efecto (configurable según pieza) |
|
Estación de piezas |
Bandejas con sistema de centrado y detección de posición |
|
Control |
Comunicación directa vía Modbus/TCP con el CNC |
|
Sensor opcional |
Visión artificial o sensor de presencia para confirmación de pieza |
Funciones del Robot:
- Toma de pieza en bruto desde bandeja..
- Posicionamiento automático en mandril del torno.
- Retiro de pieza terminada y deposición en área de descarte.
- Activación remota del ciclo CNC.
- Funciones de seguridad integradas (parada de emergencia, detección de contacto).

Resultados
- Reducción del tiempo de carga/descarga en un 40%
- Operación continua sin personal durante turnos nocturnos
- Eliminación de riesgos por manipulación de piezas pesadas o calientes
- Interfaz intuitiva para reprogramación por parte del operario
- Célula compacta, transportable y reconfigurable para distintos modelos de piezas
¿Querés saber más sobre nuestros equipos?
Contactanos para recibir asesoría personalizada.

